
As we consider the Robot, it is clear that there are a number of parts and capabilities that need to come together to make a Robot that can actually work.
It is necessary that the Robot’s parts fit together in a manner to make a structure that can move in the manner that is desired and is a structure that has a reasonable probability that it could actually be created using materials and fabrication techniques that currently exist.
Once we have the Robot and its structural parts, then we need to get them to move in the manner that we want for the Robot. The process of moving these parts includes that there is a motive force or process that can actually get Robot motion to occur, and that there is a control mechanism for this force so that the motions of the Robot are what we want.
As you can see throughout this Robot website, our method of presentation of the Robot is to outline all the parts and processes that are needed, and then to discuss these one by one.
This update concerns the work to create a power source for the Robot that will fulfill the various requirements for powering a Robot like the one that we are describing. These requirements flow from our overall objectives for the Robot. A fundamental objective is that the Robot tends to move and resemble the manner of walking that human beings have. In addition, we want the Robot to be able to just “walk along” with some humans, very much in the manner of a friend or companion.
It is clear to us that these requirements just force the power supply for the Robot to be quiet. And we mean quiet where the Robot’s noises of its action would not be a bother to the people it is walking along with. So, as one considers the perceptual capabilities of normal human hearing, then this means that the Robot will need to be really quiet, and we should probably change that to be that the Robot needs to be really, really quiet.
Our presentation about powering the motion of the Robot will be divided between:
1) what the power source needs to be able to deliver, and
2) how we are going to structure that power source so that it is as quiet as we want it to be.
The first part concerns the design of a pump that can supply the needs of the various pistons of the Robot so that the Robot can just “walk along” as we want it to do.
The first step in creating this pump is to calculate what flowrate is needed because this gives critical parameters for the size of the pump. This pump will be located in the thorax of the Robot and its action will be pulsatile because this action has such a high probability that the pump will be able to run silently. The determination of the flowrate needed includes measuring the motion of each piston as the Robot walks along and converting this motion into a determination of how much fluid flowed into that piston and what was the flowrate.
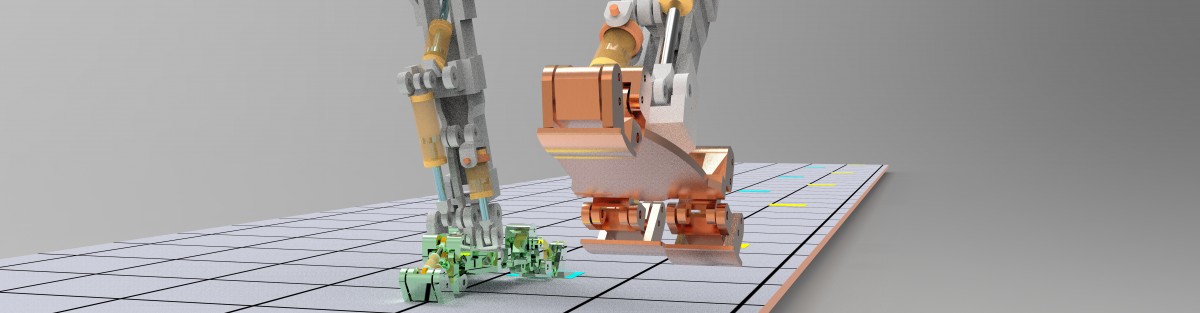
We point out that each leg has 8 pistons and the motions of the Robot walking was divided into a sequence of 22 stances, which means that to understand the total fluid flow, we needed to measure the position of all 16 pistons (8 for right leg, and 8 for left leg) for each of the 22 stances. Our presentation here is showing how we measured this.
An issue is to do these measurements in a manner where it is unlikely that one will get confused or “mixed up” in trying to keep up with so many different pistons with so many different motions. We solved this by using a feature of Sketchup that allows us to put structures inside the pistons that represent the motion of the piston, and we can add colors (red for measurements on the right leg, green for measurements on the left leg), and we can add textures where the location and type of the piston can be specified and attached to the structure, so that at any point if there is a concern about what exactly is being measured, one can just look at the structure and “read off of it” what it represents.
The discussion continues below: