I designed a set of Linear Actuators. They could easily be used in the Pistonrobot, and that is their original purpose. I have placed the topic in the area: “Discussions Not about a Pistonrobot” because these Linear Actuators could be used for many types of applications, not just the Pistonrobot. I feel the Linear Actuator that I named the Simple Linear Actuator can be fabricated where its sale price could be very low. This would allow, for example, this Simple Linear Actuator to be used to create simple, but properly functioning toy robots.
The Linear Actuators that I designed could be used as a substitute for the hydraulic cylinders in the Pistonrobot. I don’t think the Linear Actuators have as many advantages as do proper hydraulic cylinders, but the Linear Actuators are simpler, they only need electricity to run, and they are cheaper.
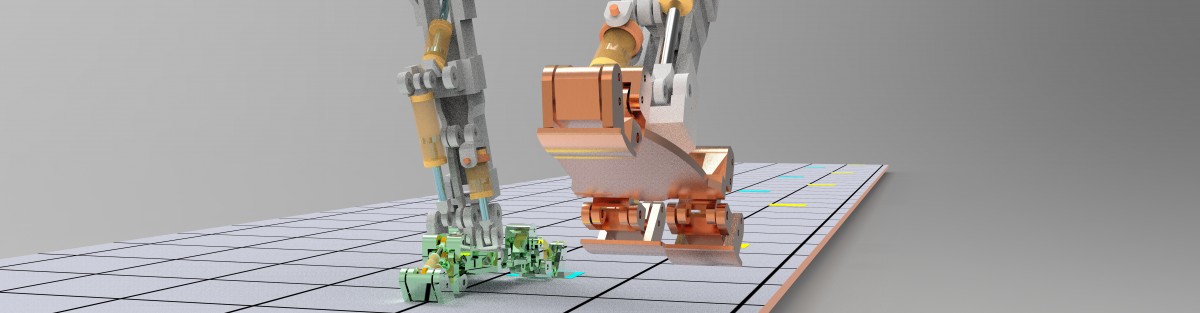
I put some images here of some Pistonrobots just moving around so that you can see the hydraulic cylinders (common name: pistons) moving around inside the Pistonrobot. I have more discussion after the images. Of note, the images on the website are smaller (png type about 6mb each), but if you click on the download option for the images, the downloaded versions (also png type) are much larger and (I think) prettier.










The Pistonrobot is designed to be a very close mimic of the human. This mimicry includes that the proportions of the Pistonrobot and its various sub-parts are very similar to those same proportions in the human. This mimicry also includes that the forms of movement that the Pistonrobot can perform, both the overall motions of the whole Pistonrobot and the motions of its individual sub-parts, these motions are set so that they are a close mimic of the kinds of motions that a human can do.
I felt that the hydraulic cylinder (as a prime mover) for the Pistonrobot had a form of motion much closer to the form of motion of the human muscle. This opinion is with respect to comparing the nature of the motion of a hydraulic cylinder against the type of motion that is the normal form of motion of a rotary encoder type of prime mover.
I should note that while hydraulic cylinder is the technically proper term for this form of prime mover, that most people simply call this device a piston. This is the reasoning behind naming this robot the Pistonrobot.
A significant issue with the hydraulic cylinder is that the collection of all the parts that allow a hydraulic cylinder to function properly is a complex and expensive collection. I don’t think this fundamentally alters the advantages of the hydraulic cylinder, especially if one is trying to mimic a human. I do think this problem of complexity increases the price for providing a prime mover item for the robot and also adds complexity to creating the robot.
I decided to design a Linear Actuator that would function in the manner of a hydraulic cylinder, but this Linear Actuator would not have the complexity and expense of a true hydraulic cylinder. It is my opinion that these features are useful to design because it allows creation of a Pistonrobot that is less expensive and less complex. The Linear Actuator is designed so that one of these Linear Actuators can be simply “swapped in” at each location where there would have been a hydraulic cylinder.
I designed two different Linear Actuators. I named one the Simple Linear Actuator. This simple version is designed to be the least expensive type of prime mover that one could use in the Pistonrobot. I named the other design the Sophisticated Linear Actuator. This sophisticated version is much more precise and accurate in how its motions can be controlled and it has much larger power and speed of motion parameters because it can be water (or fluid) cooled, allowing its electric motor to be both faster and more powerful.
I plan to add some images to this page just showing various places where there is shown the actions of the pistons of the Pistonrobot.
I did create YouTube videos where I discuss these Linear Actuators, how they look and how they function.