Hello Folks,
I will send updates to this page as I am working on the robot hand. I will add these updates just below this paragraph, so that the most recent stuff is at the top of the page.
I have a video discussion where I am demonstrating this robot hand using Autodesk Maya. The Autodesk group of progams allow many different 3D activities to be performed for example 3d Drawing and Rendering via Maya, also CAD drawings and CAD type specification outputs for creating 3D structures using procedures of machining, also 3D file output types that allow 3D printing. The pictures below were rendered using the Keyshot rendering program with Keyshot doing the rendering using import of Maya files about this robot hand.
I do have some YouTubes about this robot hand topic at my YouTube channel. The name of my YouTube channel is Patrick Gray, of course, I invite you to subscribe, I think there’s some fun stuff there. Here is one of my YouTubes on the human mimicking robot hand topic.













Here is an FBX export of the human mimicking robot hand design that I am working on. This FBX is for the robot hand as of Mar 14, 2024, it is not yet quite finished, but I do have the thumb in it. This FBX shows three positions of the robot hand. Position 1) the thumb is under the palm, this is the thumb position where the thumb can be used for a “pinch” action between the thumb and a finger for delicate work with small objects. Position 2) the thumb has moved away from the palm and up toward the back of the hand, this gets the thumb out of the way so the hand can be used to do a push activity, such as a pushup, or pushing open a door, or pushing against the ground to help the robot get up if it fell. Position 3) this is the thumb and the fingers and hand in the “thumbs up” position, the thumb is away from the hand, pointing upward, and the four fingers are curled up into the palm, this position is shown just because it seems a fun position. There is also an image of a more normal looking hand and forearm to again show the “thumbs up” position.


Here are two Autodesk Maya files that show this version of a human mimicking hand for a robot.
Here’s an FBX export (180mb) showing the proposed robot finger located inside a human type hand. I created this human hand form as a 3D drawing in Sketchup and put the finger inside it. I added a decrease in the opacity of the hand form so you can see the finger inside it. The FBX does open up in MayaLT, so I think any of the Autodesk 3D drawing programs should open it.
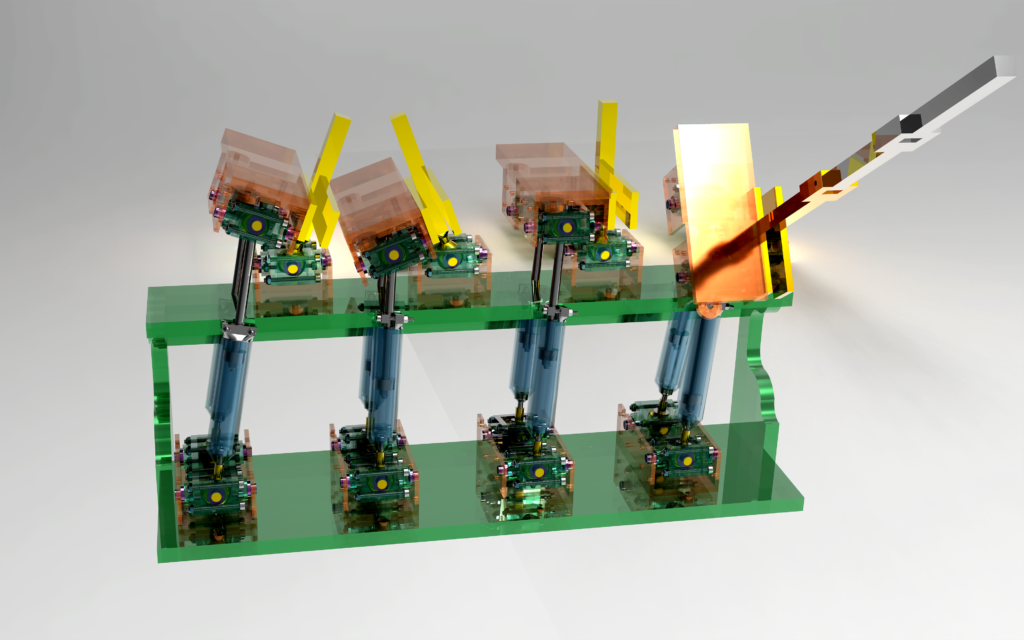
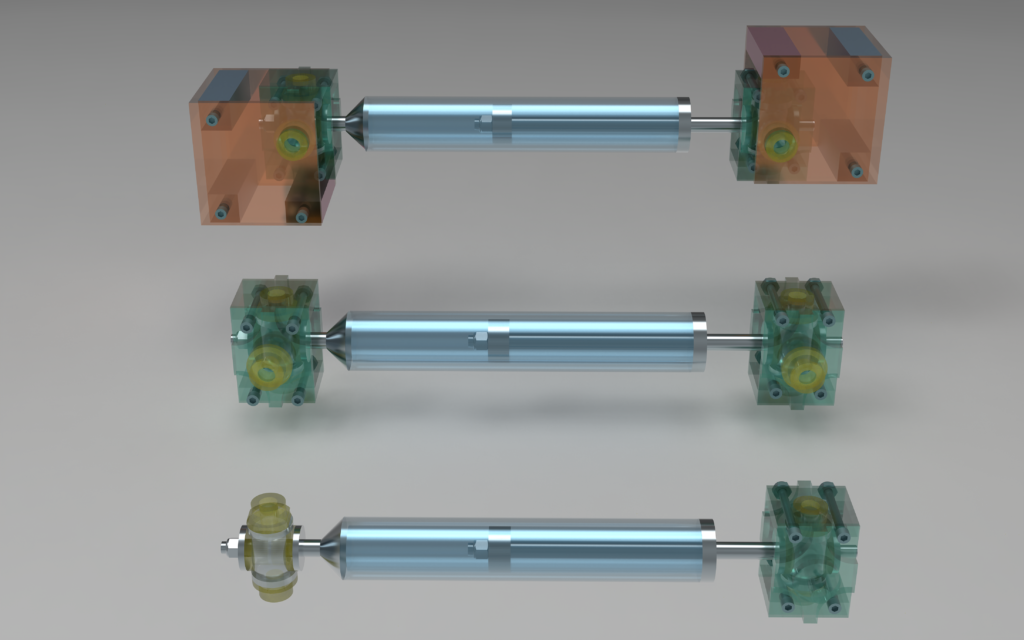
Here’s an FBX export as of Jan 05, 2024 of a test setup that I am designing that will allow one to test the feasibility and properties of using the Igus product that Igus named IGlide (this product is a self lubricating polymer bushing material), anyway using one of these polymer flanges as the cylinder portion of a hydraulic cylinder. It is not a complete drawing yet, I have a few more things to add to it.
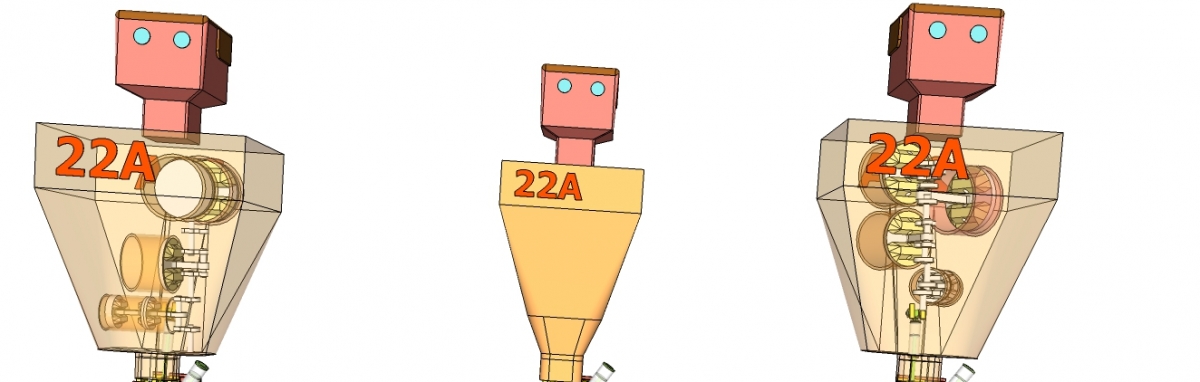
I am working on using a combination of cardanic articulations and small hydraulic cylinders to create for the hand of the robot what is the equivalent of the intrinsic muscles of the human hand. This approach will give the robot hand an ability to have fine and complex motions of the fingers of the robot hand just as humans have fine motions of their human fingers. This is a separate system from another part of the robot hand that gives the robot hand very strong grasp and pulling power. In humans, the human hand strong ability is separate from the features given by the intrinsic muscles of the hand, and I am trying to duplicate this for a robot hand where the purpose of this robot hand is to be a mimic of the human hand.
I am working to design a robotic hand. This hand will be a mimic of the human hand. Of note, the real human hand is best considered as being two hands superimposed on each other. One hand has significant grip strength for holding onto objects and for lifting them, also for this hand, as part of its strength capability of pulling plus strong grip capability, it means that if the human were to hold a stucture like a bar or rope, then the significant grip hand of the human is strong enough that the human hand could hold up the human. That is, the human, using their significant grip capability of their hand, could grasp an item like a rope or bar shaped item and the human could dangle from this item using the grip strength capability of their significant strength hand. The other hand that humans have is the hand where the fingers can be moved around in very precise, complex, and manipulative manners so that small objects can be held, moved around in the hand, and these items can be carefully and gently grasped, picked up, moved around, and then put back down again, and this includes being able to do this with very small objects with a great variety of different shapes.
Of course, getting these two different capabilities to be present in one physically real robot hand is a challenge. It requires that the robot hand use the same priciples that are used for the human hand. The human hand gets its significant grip strength capabilities from strong (and thus large) muscles, these muscles, to be this strong, become too large to be present inside the human hand and instead they are located in the forearm and they exert their large strength function on the fingers of the hand by use of ligaments that run from these muscles in the forearm down to the fingers in the hand. The delicate and very precisely controllable features of human fingers are obtained by use of a set of small muscles that are located in the palm area of the hand. In the human these precise, careful, small, and delicate motion capable muscles are called the intrinsic muscles of the hand.
I feel it will be necessary, if one wants to create a robot hand that is a close mimic of the human hand, then it will be needed for the robot hand to also have these two hand functions as the human hand does. Thus, there will be strong pulling items in the robot forearm that are connected to the fingers via flexible wire cables letting the fingers of the robot hand have significant and strong grip and pulling capabilities. But also there will need to be small movement creating items located in the palm area of the robot hand to give the robot fingers the precise, delicate, and very flexible controlling and manipulating capabilites that the fingers of a human hand has. This is the design objective here for the robot hand and I will be discussing a set of parts and valves and hydraulic cylinders that I think can be put together to function together to give a robot hand that has all of the features of the human hand.
This will involve many parts and I will be discussing them part by part and I hope to show how they can act together to give a human mimicking robot hand. I am pretty sure it will not be possible to totally duplicate in a robot hand all the capabilities that a normal human hand has, but I think I can get close, but it does involve a complex set of parts, so I will describe them and create videos where I hope I can show that this human mimicking robot hand is completely feasible and could for sure be created as a physically real item.
I think one important part will be a valve that can control the hydraulic cylinders that will act as the force and power structures for this robot hand. I have a YouTube that I sent to my YouTube channel where I discuss this valve. Of note, this valve is a digitally controllable device that I think is also very useful for the drone topic, and for the pistonrobot topic, and the robot hand topic, so I mention all of these considerations in the YouTube.
I also want to send these robot hand videos to Linkedin as Linkedin Posts from me. Of note, Linkedin allows uploaded post videos to be a maximum duration of less than 15 minutes, so I will be creating these videos so they only run for less than 15 minutes. I think I will have to discuss very carefully just one topic or one feature of a topic at a time, but OK, I will see if I can do that. My plan is to upload these videos as posts from me on Linkedin, but then I will also send them to my YouTube channel.
I will also send some of my robot hand and robot related work to Keyshot for renders into images. I like the large png type images because I think they are fun to look at and one can enlarge them and study details. So I will also on this robot hand page upload some images. I think I will have displaying on this page smaller versions of the images in the size range of around 8mb, but then I will add download links so the 18-60mb png versions of these same images can be downloaded by you onto your computer, and then the imaging program of your computer can open these larger images.
Enjoy ! Dr. Gray
Here is the url of the YouTube that I created about the valve, I will add url’s for other YouTubes that I make on this topic to this page as I make them.
Here is an image of the lower leg of the pistonrobot. It shows the control valve in place. This valve is the proper size to control the hydraulic cylinder that acts to create dorsi and plantar flexion of the foot. This image is to show that this valve is reasonable (from a size of the valve viewpoint) as a manner to control the actions of the pistonrobot. There would need to be one of these valves for each of the hydraulic cylinders of the pistonrobot, but the pistonrobot design has enough room to allow these valves to be placed onto various areas of the pistonrobot, and of note, for the much smaller hydraulic cylinders, for example the hydraulic cylinders that control actions of the pistonrobot’s toes and heel, the valve needed for this function could be much smaller because the hydraulic cylinder is so much smaller.

Here’s another YouTube that I created on this topic.