I just finished the discussion about the weight of the robot. I realized that it is certainly reasonable that people would ask “Wow, that robot is heavy!”
“Why does it weigh so much?”
“It seems like it has a lot of parts, and all those parts add up in the sense of making the robot weigh so much.”
“So…. why does the robot have so many parts?”
It seems to me that all the parts of the robot are needed. It certainly can seem that there surely is a lot of parts, but my feeling is that once all the considerations about design and appearance and capability parameters are put together, then the final design decisions should be more clear.
As an example, I decided to discuss the robot mechanical setup that gives the robot an ability to dorsi and plantar flex its feet and also to independently invert and evert its feet. My thought is that once the explanation is presented, then people will “see” how this functionality is given to the robot and they will “see” that the reason for all the parts is to give the robot all the capabilities that are desired for that section of the robot.
One other issue to address concerns – “Why there should be so many parts?”
It should be clear that the central construction technique of the robot is to have at the base a structural member, and then, one by one, parts are attached to this base structure, and these parts give movement capabilities to the robot. I have not drawn in all the connections, but it seems clear to me, that if one studies the various parts, they all have enough bulk and space available for holes to be drilled both in the part and in the connection point of this part to the structural member, and the part can be just attached to the structural member with a basic setup of screws, washers, and nuts.
Many people will say,
“Well, that’s a crazy way to build something like this.”
“Why not just either use hot forging techniques to push the mass of the structural members into bulges that essentially can be formed into the parts, or weld the parts in place?”
But I want the robot to be something educational that people can work on, including students that are really interacting with the robot in a kind of STEM fashion. So there’s real usefulness to being able to put the robot together, take it apart, put it together, modify one part, take the original off, put the new part on, see how the robot functions….and learn about mechanics and design.
In fact, if I can just get the big sections of the robot shown on the website, then, I am considering a campaign directed at Google. I want Google to financially support the creation of a building (really a campus) out in the wilderness where there is fresh air, sunshine, and peace.
The building will have an arched entrance at the ground floor and letters across the arch will spell out the phrase….
“Place of Robots”
The building will have 3 floors. Mechanical fabrication, testing, and assembly on the first floor, development of robotic control programming on the second floor, and admin on the third floor.
The first floor will have a set of lanes, like a bowling alley, except the lanes will be elevated off the ground and have a safety support rail that would run above each lane. The lanes would all be together in a convention hall type room setting, but beside each lane would be its own bank of storage lockers and computational support.
Google would set up mini “scholarships” for teams to go to the “Place of Robots” and work through proposals that the teams had sent to Google in a competition type setup. The teams would “own” or at least control one lane for a week or two, and Google would give them a Little Robot or a Piston Robot, and it would be theirs for their time at the “Place of Robots”.
They would proceed to place their proposals into effect and see what happens.
Google would pay for all this by outfitting the entire first floor with multiple live streaming webcameras with video and sound. The whole world could watch the various teams “work out” whatever they were trying to improve with the robots.
Advertising (Of Course There Would Be Advertising) would be on the web camera streams and from these advertising activities would be created the operating capital for the “Place of Robots”.
Anyway, in order for what is described above to be possible, the robots must be formulated in a manner where everything (and I really think it would need to be just about everything) that was a part of a robot could be taken off, modified, re-attached, re-placed, re-worked as the teams did their research.
So the pistonrobot design has a well entrenched quality that it all consists of a set of parts building up into subsections. And a set of sub-sections building up into capabilities, and a set of capabilities that come together to be a robot.
Hey…so much to design…..so little time.
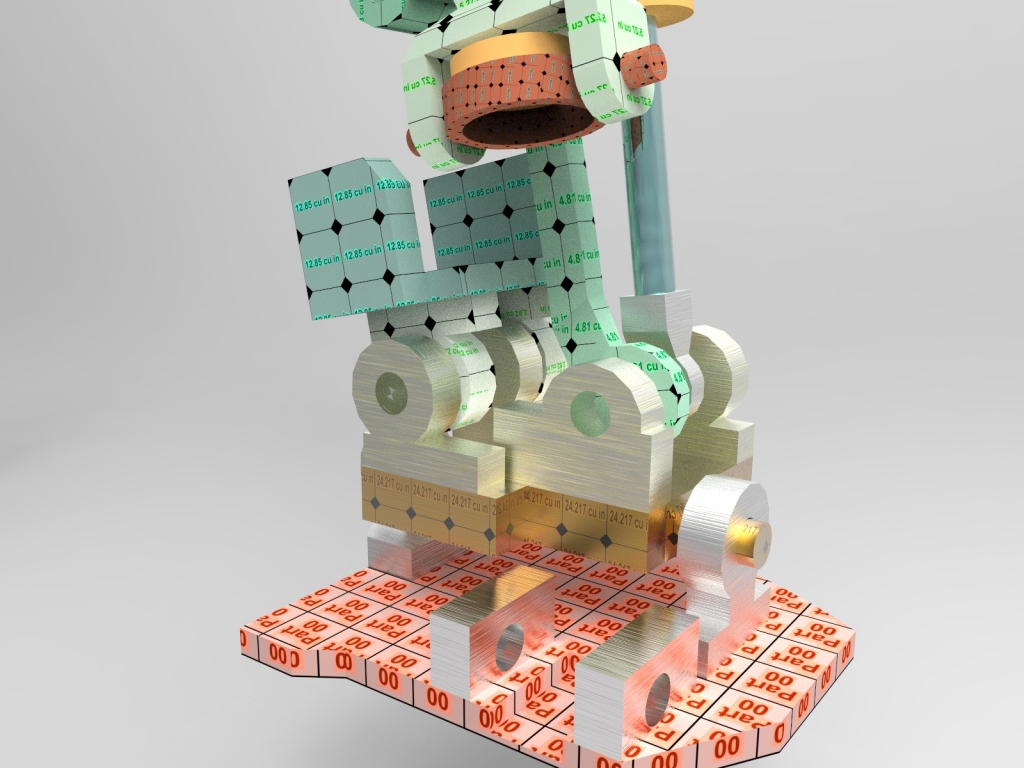
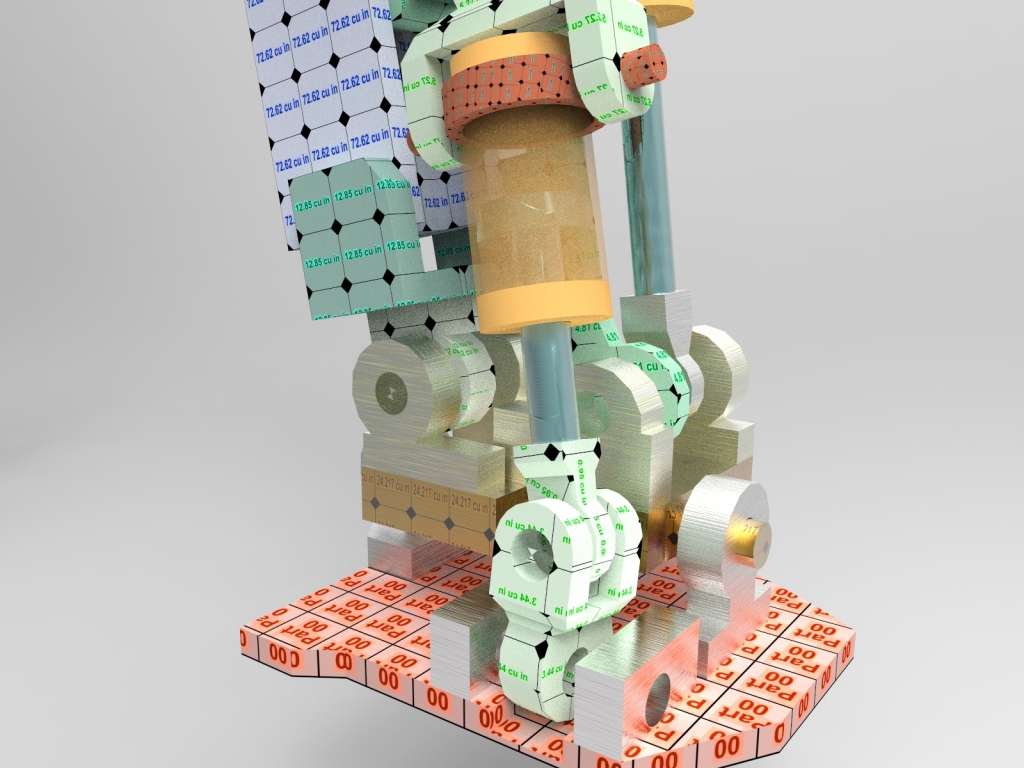
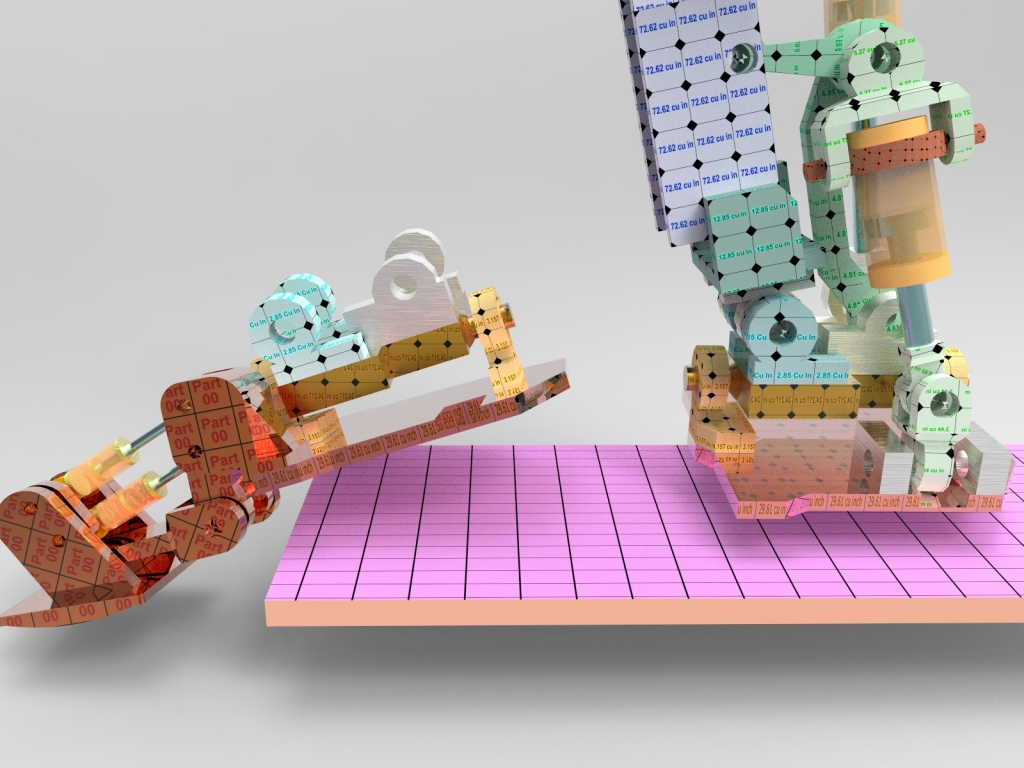
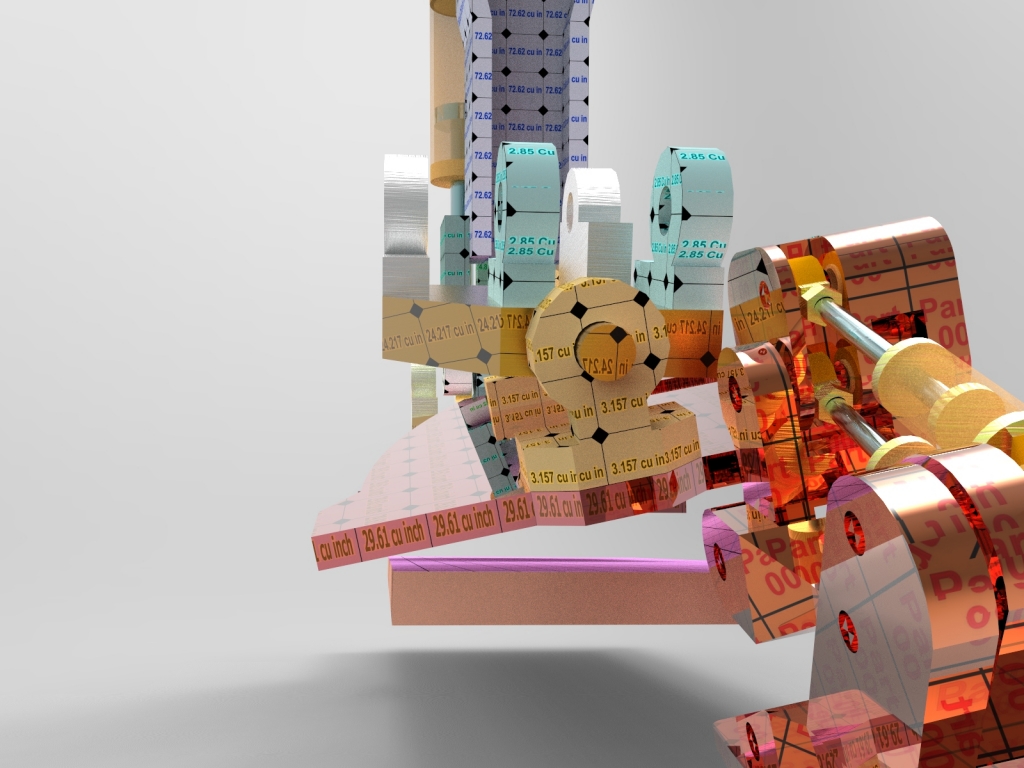
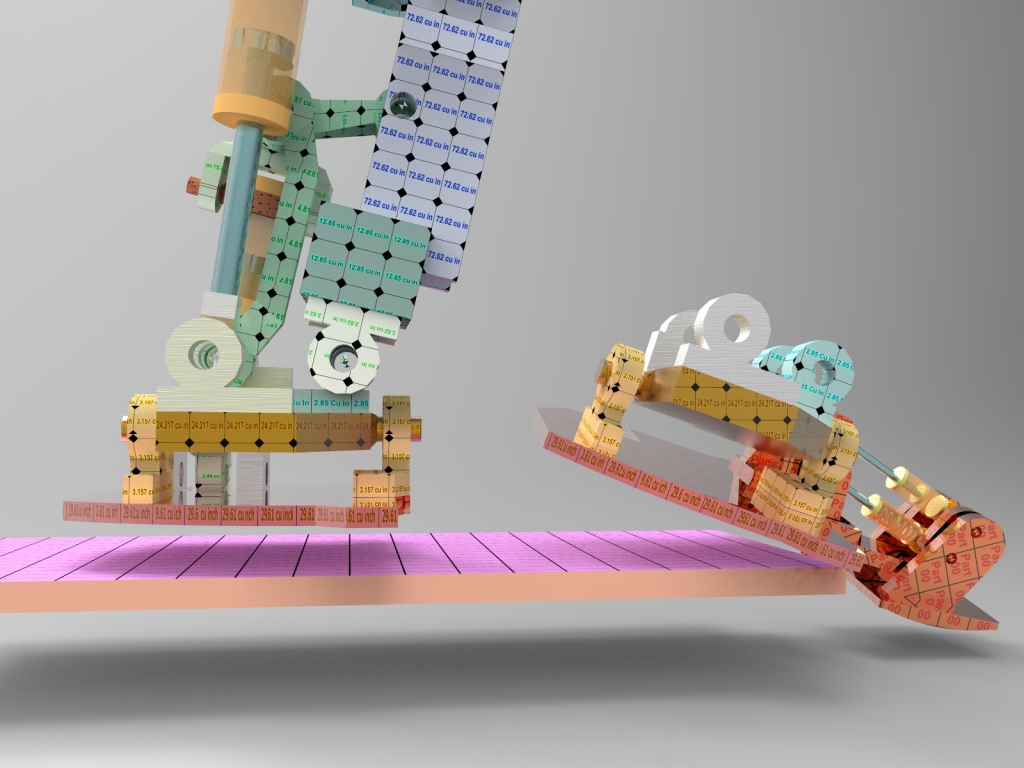
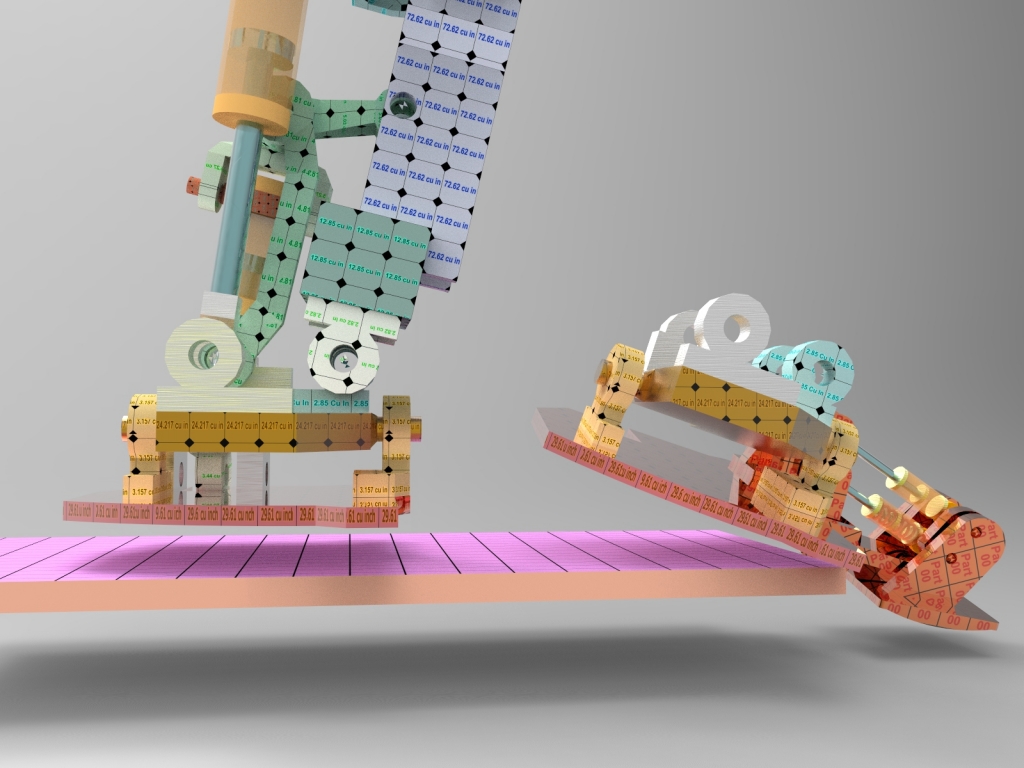
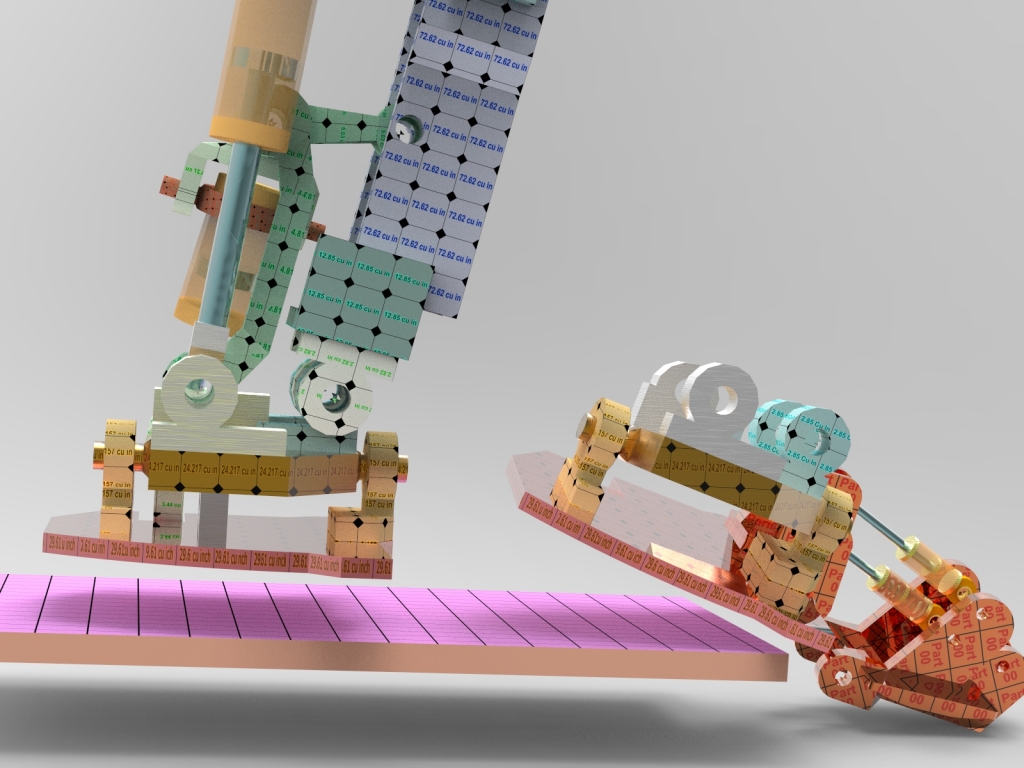
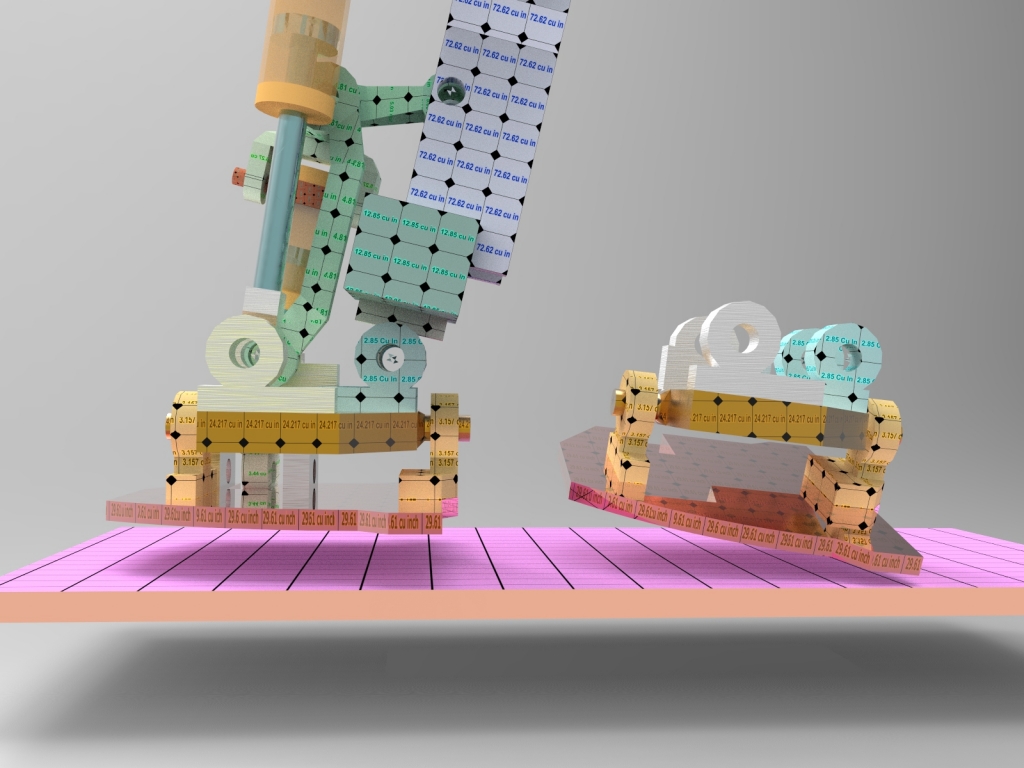
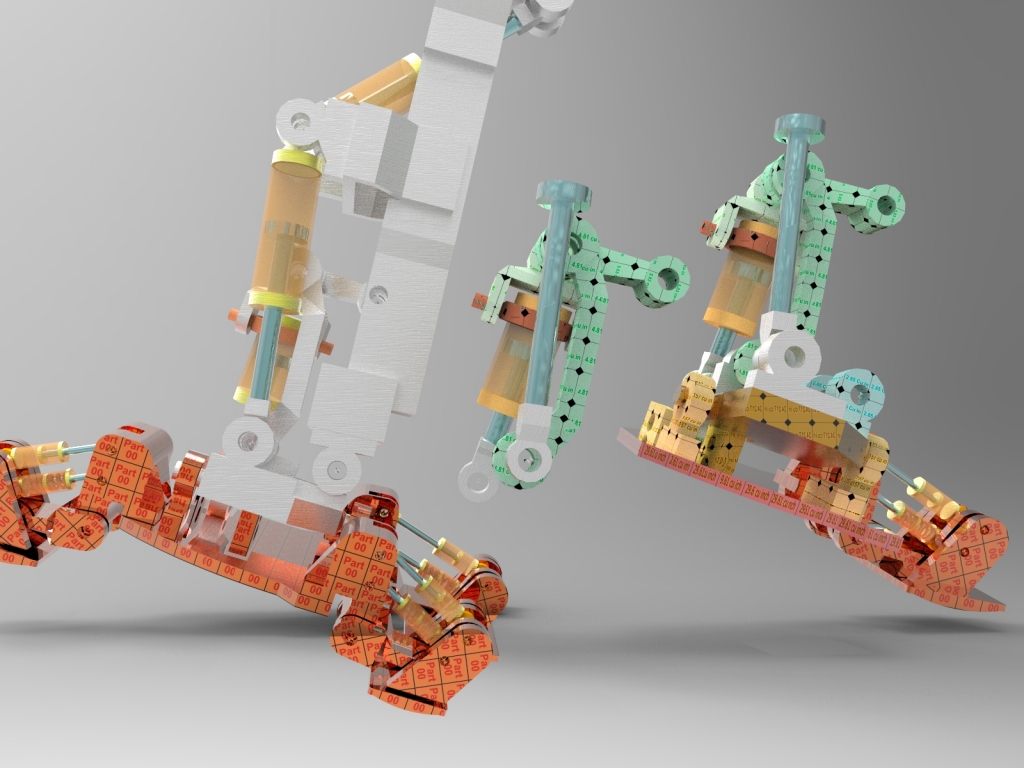
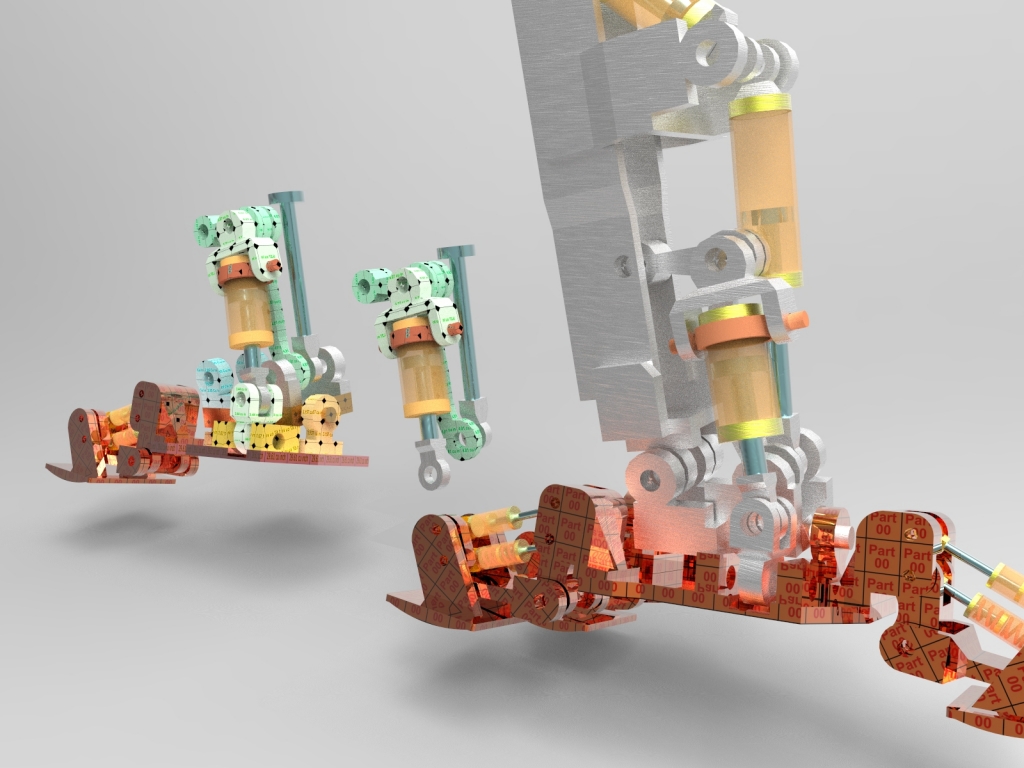
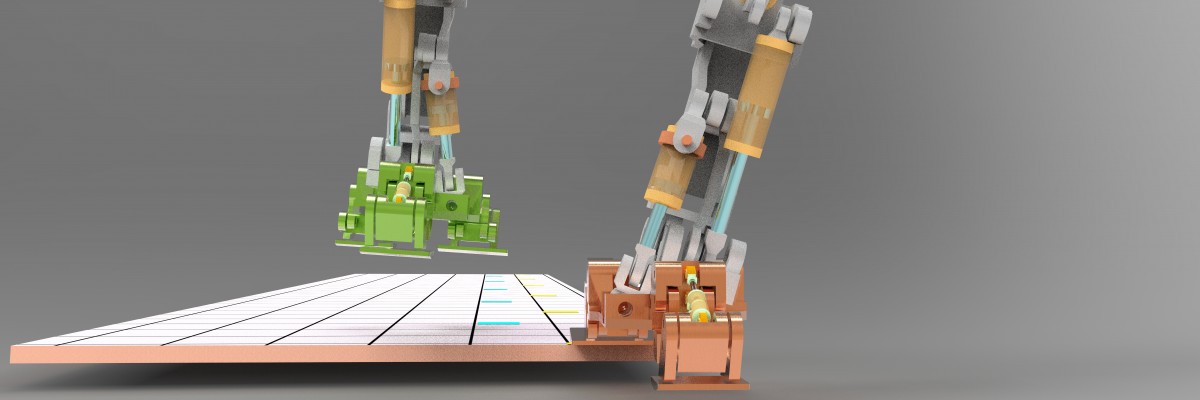
I thought I would start a discussion about how I set up the ankle so that the foot can be either dorsi-plantar flexed and/or inverted-everted in a manner where the action of the piston that causes one of those motions will not force an alteration of the condition of the other motion.
That is to say, that whenever the robot changes the amount of dorsal or plantar flexion of the foot, then this specific action will not also make a change in the amount of eversion or inversion of the foot.
It is done with linkages, and I just figured out how to make significantly enlarged images with KeyShot v6 on the Sketchup 2016 Pro drawing files. I thought the enlargements were cool, so I have uploaded them to this page.
I plan to get the discussion in soon, I hope. Enjoy.
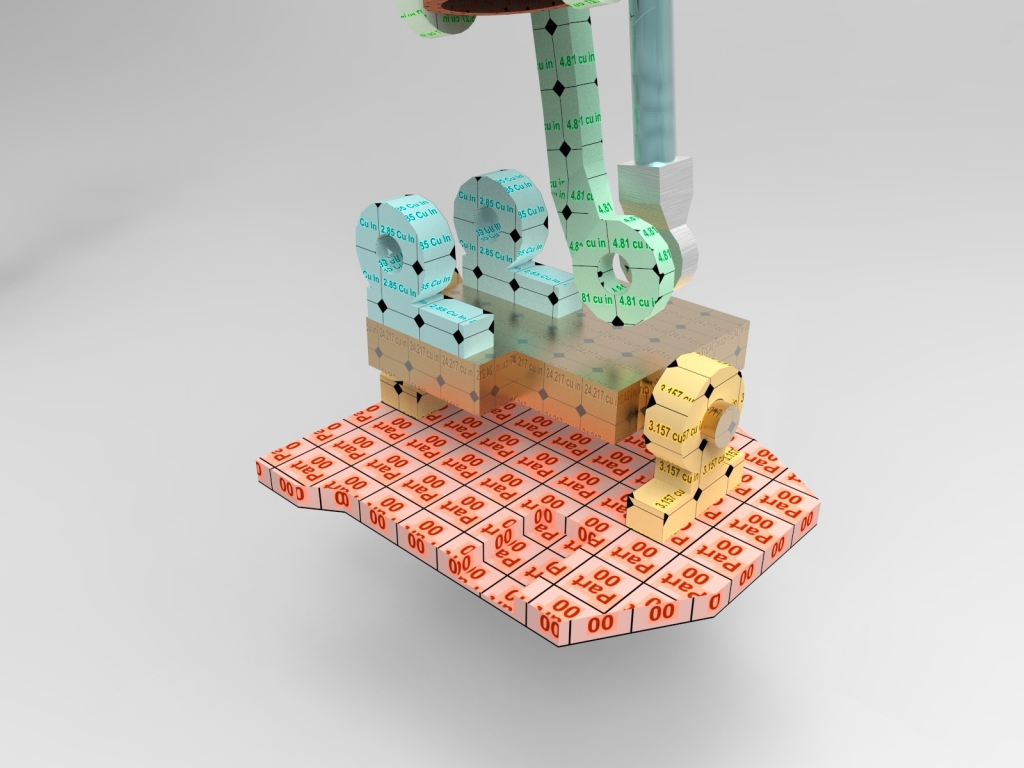
Final-Enlarged-Inversion-Eversion-Linkages-plus-correct-cu-in-colors-v9.42.jpg