Welcome to the Pistonrobot website.

44mb mp4 video Thumbnail Sets-01-14-v1-using-camtasia
124mb mp4 Here’s a larger version that’s more clear and shows the robot doing more turns.
fbx DOWNLOADS
I have placed here also a low res image of what 3D drawing the particular fbx file set will create.

{kind=link}
Texture Image Files For fbx Imports Are Located Here

{kind=link}

{kind=link}
Texture Image Files For fbx Imports Are Located Here
Texture Image Files For fbx Imports Are Located Here

{kind=link}
I list here the Sketchup Pro 2021 drawing files (*.skp file format) that I created to draw out the 3D structures listed above.
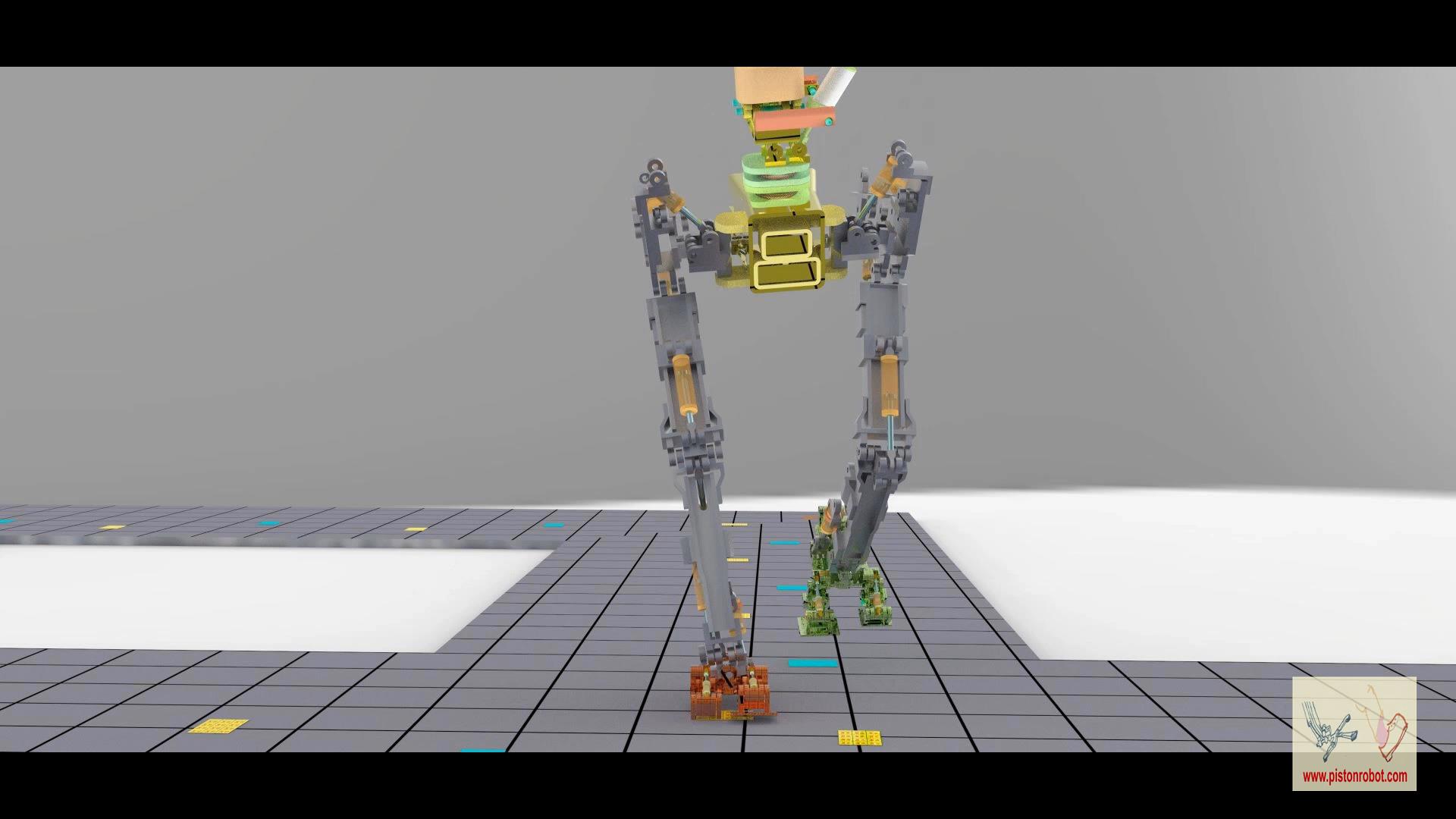
I made a sequence of the pistonrobots just walking along in a straight line, I called this “Straight Line Walking.” I used these images to create some of the pistonrobot animations. These pistonrobots that I used to demonstrate straight line walking did not have arms because I had not yet created the arms. I also wanted to demonstrate the pistonrobot using its mimic design. The pistonrobot is designed to be a mimic of the human, both in its proportions, and its types of motions, and it ranges of motions of its joints. I wanted to show the pistonrobot moving from one stance to a different stance as a set of drawings to show how the pistonrobot is a mimic of the human. I set out a series of drawings where the pistonrobot is initially standing upright, then it moves its joints and appendages to get itself into a deep knee bend stance, then it moves itself back to the “just standing there” pose. I include some images that are renderings from these sets of activities.
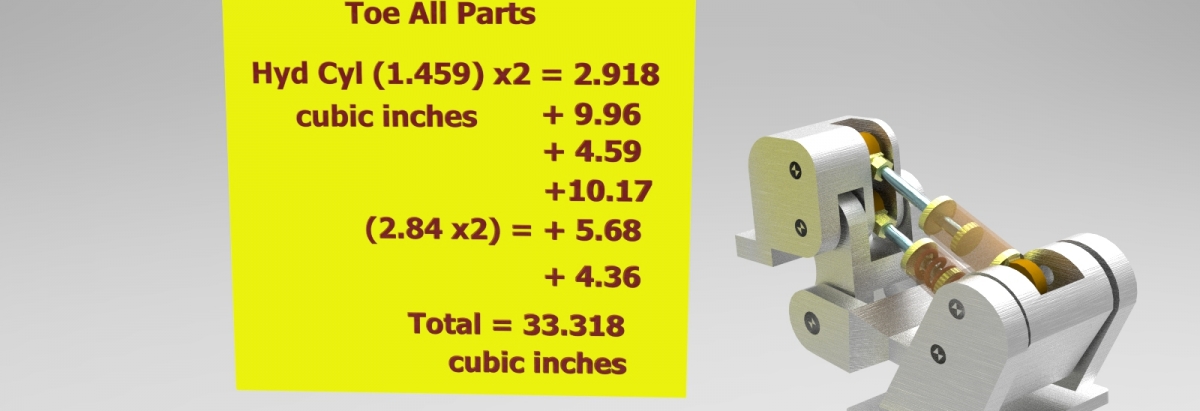
I feel the best design element to provide the motive force for the pistonrobot is to use a hydraulic cylinder. Hydraulic cylinders have a motion type that is a very close mimic to the human muscle and a lot of force and power can be placed into a structure that has a very small volume if one uses hydraulic cylinders. Problems with hydraulic cylinders, however, include that they are complex, expensive, and that it is not simple to monitor the motion of a hydraulic cylinder in a manner that is easily converted from analog measurements of the movement of the hydraulic cylinder’s parts into digital data that can be sent to and processed by the CPU of the robot.
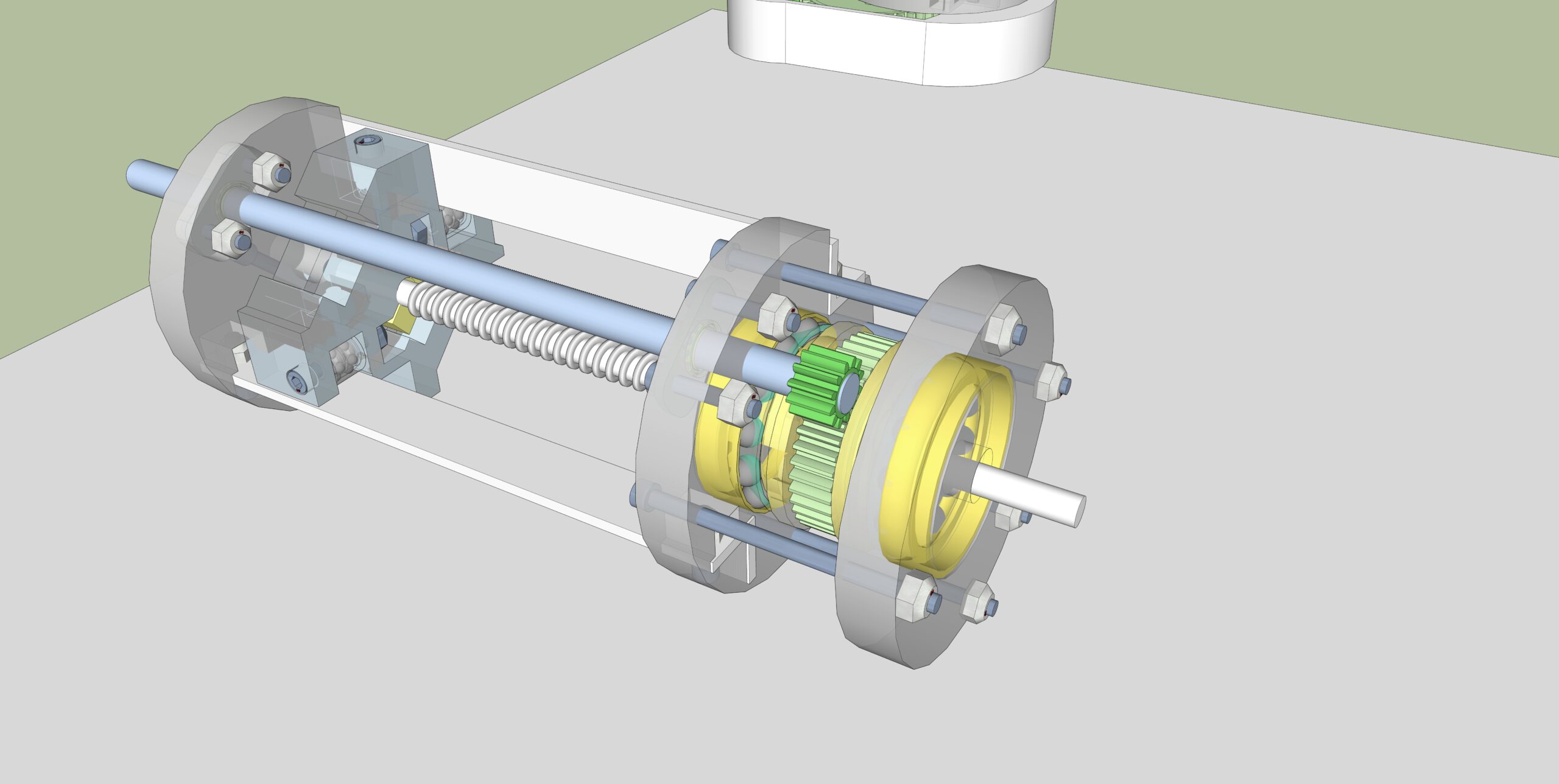
It seems reasonable to me to design an electrically powered linear actuator that has a motion very similar to a hydraulic cylinder, but this linear actuator does not need any of the parts and procedures of actual hydraulic motion. I designed what I call the “Simple Linear Actuator.” This simple version is an actuator that (I hope) is a very inexpensive version of a hydraulic cylinder. This simple version does powered motion and little else. I designed it so that people with limited budgets could make a pistonrobot and actually “power it up” and watch it move, even on a small budget. I designed another electrically powered linear actuator that I call the “Sophisticated Linear Actuator.” This actuator has significantly better features than the Simple Linear Actuator and would allow one to create a pistonrobot that could really be a cool robot that could do a lot of actions and do them well with (I hope) very little problems, breakages, or down times.
I also added downloadable files here of these two Linear Actuators including again, Sketchup Pro 2021 drawing files, *.fbx exports of these Sketchup drawing files, and some rendered images of these Linear Actuators.
I created some mp4 videos where I just talk along about these topics and have ongoing visual input from the Sketchup Pro program output. I have included links here to some of my YouTube videos about the Pistonrobot.
So everyone…Enjoy! Dr. Gray
I think if we allow hydraulic cylinders (pistons) to be the motive force item for a robot, that this choice best allows a robot to have a human form and to behave (move) as a mimic of a human being. I think this ability of the robot to mimic human motion is exceptionally important on the topic of a balanced bipedal walking structure. As one attempts to make a balanced walking bipedal device, two large problems arise immediately. Problem 1) How exactly does one want this device to look? How are the creators of this device going to answer the multiple questions of just how is this device put together, what is the proportions of its limbs, what kinds of joints will it have, what is the range of motion of each of these joints, etc.?
I see this problem as the physical design questions problem. Problem 2) How are the designers going to choose which motions the robot will use as it solves the problems of how to get itself walking from a stable standing stance, how will it just walk along on level ground, how will it change its direction of walking, how will it perform recovery or compensatory motions to react to the event of the robot beginning to fall over?
It seems so clear to me that all of the fundamental and difficult design decisions that flow from the questions and problems of the previous paragraph are so easily answered if we decide, as the designers, that we are simply going to mimic the human form. Thus, for all the design questions that come up, all we have to say is, (for questions of what physical form should we give to the parts of the robot) “Well….what is the physical structure that is used in humans?
Or, once the physical robot exists, our answer to questions of what programming are we going to use so the robot can respond to the situation at hand, we can simply say “Well…how do humans respond to this movement problem?”
I wanted people to be able to create a pistonrobot or perhaps just some parts of a pistonrobot to see how this “mimic a human” approach could be done. I feel it would also help to demonstrate to people just how simple everything becomes if we can follow fairly carefully the design principle of “mimic a human.”
I understand that hydraulic cylinders require pumping fluids so they are under pressure and can flow inside hydraulic cylinders so that the hydraulic cylinders can move. This also requires pipes to convey the fluid and valves and control setups for the valves. This makes a proper and functioning hydraulic cylinder control capability to be an expensive setup, and I decided to create an inexpensive version of a hydraulic cylinder. This inexpensive version runs off of electricity and does not require all the expensive components of a hydraulic cylinder system. I am showing here my design of two different Linear Actuators. I named the first one as the “Simple Linear Actuator.” I named the second one as the “Sophisticated Linear Actuator.” The main feature of the Simple Version is that (I hope) my design allows inexpensive creation of a functional Linear Actuator and this Linear Actuator can act as a substitute for a hydraulic cylinder. People can investigate the concepts of the pistonrobot with an inexpensive, simple, easily understood, and easily implemented Simple Linear Actuator.
I designed the Sophisticated Linear Actuator to have very impressive capabilities so that there would not be limitations forced on the pistonrobot from using a Linear Actuator instead of a Hydraulic Cylinder. I am hoping that a pistonrobot with the Sophisticated Linear Actuators could be a robot that could exactly mimic a pistorobot that was constructed with hydraulic cylinders.
I placed videos about the Linear Actuators on my YouTube channel because they are large videos. The video discussing the Simple Linear Actuator is 2 hours long and is 2.33 gigabytes in size. The video discussing the Sophisticated Linear Actuator is one hour long and is 1.37 gigabytes in size. I know that many people prefer YouTube so that they do not have to manage files of this size.

{kind=link}
I designed a method to “sense” the extent of retraction-extension of a piston in a robot. I decided to describe this new sensory system via a set of 5 minute videos that piece-by-piece put together how this sensory capability will be created.

Well…. a New Year is here (2019) so I thought to add a brief note of what I’ve been up to. In October, 2018, I thought I would take a few months off from the robot to work on a Flying Machine.
I’m still working on it. I will eventually create a page for the Flying Machine, and I decided to change its name, my new name for it is: Heavy Lift Drone.
More about the Flying Machine is at the page named:
The Flying Machine the Four Superheroes
All to follow. Stay tuned! pg

I also took a year off to create arms for the pistonrobot. Its interesting, an autonomous robot needs to have very central to its creation an ability to get itself back to standing balanced and upright in the bipedal pose after it falls down. Because, particularly as the robot is developed, it’s gonna’ fall down a lot! Anyway, I realized that arms are so important in the process of giving protection to the robot to try to prevent damage as it is falling over, and also to help the robot to go through the motions and actions that allow it to get itself from “down on the ground” back to “standing up.” So I gave it arms and they have a significant range of motion in all axes as will be needed and they are robust and have a lot of potential force that they can exert. Anyway, I got one of the “New” pistonrobots and sent him outside to pose in front of the trees to show us all his new arms, and I asked him to give us a wave, and I even got a little smile. I thought the image was cool, so here it is. More to come.
I have parts of the website that are mostly present to display the Pistonrobot images and set the website up so people can download these images.
I found that I could make sets of 3D drawings where I incrementally alter the position of the Pistonrobot, make renders from these 3D drawing files, and then “string” these rendered images together to make videos that, again, as a great surprise to me, have the appearance of videos of the Pistonrobot moving around, and there is not even a physically real version of the Pistonrobot! I am just fascinated by that and I give some space on the website where I discuss how these videos were created.
I also discuss other topics of interest to me at this website and these topics really don’t have much to do with the Pistonrobot or robotics, but they are topics that I think are interesting. These topics are arranged in their own section.
HERE’S Where the topics are NOT about Robots
I tend to render my Sketchup Pro drawings using KeyShot, here are some KeyShot files that will let you also do these renders, providing that you have a functioning copy of KeyShot on your computer.
https://pistonrobot.com/free-downloads-keyshot-package-files-other-topics/
Here are some large filesize images free for download on this page of the website: Pistonrobot webpage about large file size images
Again, welcome, I’m glad you’re here and have a good time and come back again anytime. pg
Note: I also have a LinkedIn listing under my name: Patrick Gray
Note:I send some of my SketchUp drawings to my collection on the 3D Warehouse site maintained by Trimble for SketchUP drawings.
link: SketchUP 3D Warehouse drawings
link address https://3dwarehouse.sketchup.com/

I made an mp4 video showing internal and external rotation of the left arm. I made this video using stop motion techniques to create the video from still image renders from KeyShot v7.
Here’s the KeyShot package file you can use to see how I did this in KeyShot (of note, you will need KeyShot to open this package file (and I think you may be required to use the educational version of KeyShot, I am not sure on this point).
Once you get to the 3D Warehouse, in order for you to see my SketchUp drawings at the Warehouse, you will need to ask the Warehouse to search for my collection. The name of my collection at the 3D Warehouse is: pistonrobot



I was selected by “Merch by Amazon” to be one their creators for T-Shirts. I feel honored that Amazon gave me that designation.
I’ve added some new images in the Turning Prayer section. I just thought they looked really cool, so I added them. They will go onto a TShirt at some point, I am still figuring out how to do this.
Pistonrobot Deep Knee Bend T Shirt is available via Amazon

Pistonrobot Don’t Worry We’re on it T Shirt is available via Amazon
Here’s the front image of our next tshirt:
The T Shirt named: When You Look at Amazon
Here’s another of the Turning Prayer TShirts:

Here’s the link to go to this TShirt on Amazon

I wanted to show how the fuel injectors would heat up the air in the combustion chamber. So I just worked around to see if I could make anything that looks like 3D flames. Anyway, this is the engine that I am designing to be the power supply of the robot. I plan a YouTube lecture on it, the video name will be: Pistonrobot the Engine of the Heart

Here’s the actual Sketchup Pro 2019 drawing file for this new engine:
Here’s a video showing this engine running.
Here’s where you can download the video 53mb mp4 that I made showing this engine as it runs.
But I’m not quite ready to start creating the video where it shows imagery of the gas flow, and the injection of the heated fuel, and the ignition of the fuel, but I thought the flames were cool, so I sent them up to the warehouse
and (as usual) this is a 3D drawing that has a lot more to show if you will download it from the Trimble 3D Warehouse site and open it on your own computer.

Sigh,
as it happens, the Little Guy needed to “bulk up” some in order to get that engine in his chest. Isn’t that always the case…..
I thought he looked pretty much OK with the big chest, if Pistonrobot is ever actually created, it will probably be the military that does it anyway…..
and they all look like that.


